Birinci sinif şagirdlərinin uyğunlaşmasına təsir edən amillər
Birinci sinif şagirdlərinin uyğunlaşma dövrü onların idrak və öyrənmə prosesində mühüm mərhələdir. Valideynlər, müəllimlər və...
Mən özümü çox şanslı hesab edirəm ki, “Mətləb” üzrə kitab axtarışında Sergey Germanoviçin gözəl dərsliyinə rast gəldim. Kitabda çox şey var faydalı məlumat və məktəb dərsliyində olduğu kimi çox yaxşı qurulmuşdur - əvvəlcə bir az nəzəriyyə, sonra praktik nümunələr. Amma, bəlkə də, mənim üçün ən qiymətli və maraqlısı o idi ki, o, ətraf mühitdə güc elektronikası və elektrik ötürücülərinin elementlərinin modelləşdirilməsi və dizaynı ilə məşğul olur.
Matlab - Simulink.Adı:
German-Galkin S.G.
Nəşriyyatçı: Crown-Vek
İl: 2008
Səhifələr: 368
Format: DJVU
Ölçü: 21.3 MB
ISBN: 978-5-903383-39-9
Keyfiyyət: Yaxşı
Dil: rus
Bu kitab Matlab-Simulink mühitində mexatronik sistemlərin modelləşdirilməsinə dair dərs vəsaitidir. Mexatronik sistemlərin öyrənilməsində istifadə olunan Simulink və Sim Power System paketlərinin kitabxanalarının təsviri verilmişdir. Sabit və dəyişən cərəyanın mexatronik sistemlərinin qurulması və model dizaynı məsələsi müzakirə olunur.
Kitab texniki universitetlərin və ali məktəblərin müvafiq ixtisaslarının tələbələri, aspirantlar, aspirantlar, təkmilləşdirmə kurslarının tələbələri, mexatronika sistemlərinin layihələndirilməsi üzrə mühəndislər, eləcə də tədris metodik işlərinin işlənib hazırlanmasında müasir kompüter texnologiyalarından istifadə etmək istəyən müəllimlər üçün faydalı ola bilər. komplekslər.
Ön söz
Fəsil 1. Modelləşdirmə və mexatronika. Əsas anlayışlar
1.1. Modelləşdirmə, əsas anlayışlar və təriflər
1.2. Mexatronika, əsas anlayışlar və təriflər
1.3. Mexatronik sistemlərin modellərinin işlənib hazırlanması məsələləri
Fəsil 2
2.1. Ümumi məsələlər Simulink-də tikinti modelləri
2.2. Simulink Kitabxanaları
Fəsil 3. Mexatronik sistemlərin idarəetmə obyektlərinin dinamikası
3.1. Mexatronik sistemlərdə fasiləsiz idarəetmə obyektlərinin riyazi təsviri
3.2. Mexatronik sistemlərdə diskret idarəetmə obyektlərinin riyazi təsviri
3.3. Control System Toolbox paketində mexatronik sistemlərin idarəetmə obyektlərinin riyazi təsvirinin təqdim edilməsi,
3.4. Simulink paketində mexatronik sistemlərin idarəetmə obyektlərinin riyazi təsvirinin təsviri
3.5. Control System Toolbox-da idarəetmə obyektlərinin dinamik xarakteristikası
3.6. Simuiik paketində mexatronik sistemlərin idarəetmə obyektlərinin dinamik xüsusiyyətləri
3.7. Keyfiyyətin qiymətləndirilməsi və mexatronik sistemlərin dinamik xarakteristikası üçün tələblər
3.8. Mexatronik sistemlərdə tənzimləyicilər
3.9. Davamlı nəzarətçilərin rəqəmsal analoqlara çevrilməsi.
3.10. Mexatronik sistemin nəbz bağlantısının dinamik xüsusiyyətləri,
Fəsil 4. Sim Power System paketində güc elektronikası cihazlarının elementləri
4.1. Giriş
4.2. Sim Güc Sistemi Genişləndirmə Paketi
4.3. Sim Power Systems 3 Kitabxanaları
4.4. Sim Power System paketində güc yarımkeçirici çeviricilərinin aktiv elementləri
4.5. Sim Güc Sistemində güc yarımkeçirici çeviricilərinin passiv elementləri
4.6. Sim Power System paketində güc yarımkeçirici çeviricilərinin yarımkeçirici elementləri
Fəsil 5
5.1. Giriş
5.2. Mexatronika sistemlərində güc yarımkeçirici çeviriciləri
5.3. Enerji elektronikası cihazlarının əsas xüsusiyyətləri
5.4. İdarə olunan rektifikatorlar
5.5. DC gərginlik çeviriciləri
5.6. İmpuls eni çeviricilərinin elektromaqnit və enerji xarakteristikalarının analitik təsviri
5.7. Sabit rejimlərdə alternativ idarəetmə qanunu ilə körpü impuls eni çeviricisinin simulyasiyası
5.8. Mexatronika sistemlərində PWM-nin dinamik modelləri
5.9. Avtonom çeviricilər
5.10. İnverterlərin əsas xüsusiyyətləri
5.11. Üç fazalı çeviricinin modelləşdirilməsi
5.12. Enerji yarımkeçirici çeviriciləri üçün ikinci dərəcəli enerji təchizatı modelinin dizaynı
Fəsil 6. Sim Power System paketində elektrik avtomobilləri
6.1. Sim Power System paketində DC maşınının riyazi təsviri və modelləri
6.2. Sim Power System paketində asinxron maşınların riyazi təsviri və modelləri,
6.3. Sim Power System paketində sinxron maşınların riyazi təsviri və modelləri
Fəsil 7
7.1. Bir DC mühərrikinin riyazi təsviri, struktur diaqramları və modelləri
7.2. Tək dövrəli yüksək sürətli DC sistemində tənzimləyicilərin sintezi
7.3. İki dövrəli yüksək sürətli DC sistemində tənzimləyicilərin sintezi
7.4. Düz cərəyan servo sistemində nəzarətçilərin sintezi
7.5. DC servo robot sistemində nəzarətçilərin sintezi
7.6. PWM ilə tək dövrəli yüksək sürətli DC sisteminin virtual modeli
7.8. DC sisteminin statik xüsusiyyətlərinin virtual modeldə öyrənilməsi
7.9. Sim Power System paketində DC sistemlərinin simulyasiya laboratoriya skamyaları
7.10. Güc yarımkeçirici çeviriciləri ilə DC sisteminin layihələndirilməsi alqoritmi
Fəsil 8
8.1. Ümumiləşdirilmiş asinxron maşının riyazi təsviri, struktur və virtual sxemlərinin modelləşdirilməsi.
8.2. Struktur Modellər tezliyə nəzarət edən asinxron sistemlər
8.3. Tezlik-cərəyan nəzarəti ilə asinxron sistemlərin struktur modelləri
8.4. Vektor nəzarəti ilə qapalı asinxron sistemlərin struktur modelləri
8.5. Vektor nəzarəti ilə virtual tezlik-cərəyan asinxron sistem
8.6. Qapalı asinxron sistemdə elektromaqnit prosesləri
8.7. Sim Power System paketində asinxron sistemlərin simulyasiya laboratoriyası stendləri
Fəsil 9
9.1. Giriş
9.2. DPR-PK ətalətsiz kanalı olan sabit koordinat sistemində fırçasız motorun riyazi təsviri, blok diaqramı və modeli
9.3. DPR-PK ətalətsiz kanalı olan fırlanan koordinat sistemində pistonlu mühərrikin riyazi təsviri, blok diaqramları və modelləri
9.4. VD-də çarpaz əlaqələrin təsirinin təhlili
9.5. Gərginlik mənbəyi ilə təchiz edildikdə HP-nin statik xüsusiyyətləri
9.6. Fırlanan Transformatorlara əsaslanan Rotor Mövqe Sensorları və Koordinat Konvertorları
9.7. DPR-PK-AI inertial kanalı olan bir klapan motorunun riyazi təsviri, blok diaqramları
9.8. DPR-PK-AI inertial kanalı olan HP-nin statik xüsusiyyətləri
9.9. VD-nin virtual modelinin ətalətsiz DPR-PC kanalı və sinusoidal PWM ilə çevirici tərəfindən tədqiqi.
9.10. DPR-PC inertial kanalı və sinusoidal PWM ilə bir çevirici ilə VD-nin virtual modelinin tədqiqi
9.11. Ətalətsiz kanal DPR-PK ilə fırlanan koordinat sistemində klapan motoru ilə iki dövrəli yüksək sürətli sistemdə nəzarətçilərin sintezi
9.12. DPR-PK inertial kanalı olan bir klapan mühərriki ilə iki dövrəli yüksək sürətli sistemdə nəzarətçilərin sintezi,
9.13. İki dövrəli sinxron yüksək sürətli virtual sistemdə nəzarətçilərin sintezi
9.14. Kontaktsız DC Motorlu Virtual Tək Döngü Sürət Sistemi
Ədəbiyyat
Adı: Matlab və Simulink. PC-də mexatronik sistemlərin dizaynı
German-Galkin S.G.
Nəşriyyatçı: Crown-Vek
İl: 2008
Səhifələr: 368
Format: DJVU
Ölçü: 21.3 MB
ISBN: 978-5-903383-39-9
Keyfiyyət: Yaxşı
Dil: rus
Ön söz
Fəsil 1. Modelləşdirmə və mexatronika. Əsas anlayışlar
1.1. Modelləşdirmə, əsas anlayışlar və təriflər
1.2. Mexatronika, əsas anlayışlar və təriflər
1.3. Mexatronik sistemlərin modellərinin işlənib hazırlanması məsələləri
Fəsil 2
2.1. Simulink-də modellərin yaradılması üçün ümumi mülahizələr
2.2. Simulink Kitabxanaları
Fəsil 3. Mexatronik sistemlərin idarəetmə obyektlərinin dinamikası
3.1. Mexatronik sistemlərdə fasiləsiz idarəetmə obyektlərinin riyazi təsviri
3.2. Mexatronik sistemlərdə diskret idarəetmə obyektlərinin riyazi təsviri
3.3. Control System Toolbox paketində mexatronik sistemlərin idarəetmə obyektlərinin riyazi təsvirinin təqdim edilməsi,
3.4. Simulink paketində mexatronik sistemlərin idarəetmə obyektlərinin riyazi təsvirinin təsviri
3.5. Control System Toolbox-da idarəetmə obyektlərinin dinamik xarakteristikası
3.6. Simuiik paketində mexatronik sistemlərin idarəetmə obyektlərinin dinamik xüsusiyyətləri
3.7. Keyfiyyətin qiymətləndirilməsi və mexatronik sistemlərin dinamik xarakteristikası üçün tələblər
3.8. Mexatronik sistemlərdə tənzimləyicilər
3.9. Davamlı nəzarətçilərin rəqəmsal analoqlara çevrilməsi.
3.10. Mexatronik sistemin nəbz bağlantısının dinamik xüsusiyyətləri,
Fəsil 4. Sim Power System paketində güc elektronikası cihazlarının elementləri
4.1. Giriş
4.2. Sim Güc Sistemi Genişləndirmə Paketi
4.3. Sim Power Systems 3 Kitabxanaları
4.4. Sim Power System paketində güc yarımkeçirici çeviricilərinin aktiv elementləri
4.5. Sim Güc Sistemində güc yarımkeçirici çeviricilərinin passiv elementləri
4.6. Sim Power System paketində güc yarımkeçirici çeviricilərinin yarımkeçirici elementləri
Fəsil 5
5.1. Giriş
5.2. Mexatronika sistemlərində güc yarımkeçirici çeviriciləri
5.3. Enerji elektronikası cihazlarının əsas xüsusiyyətləri
5.4. İdarə olunan rektifikatorlar
5.5. DC gərginlik çeviriciləri
5.6. İmpuls eni çeviricilərinin elektromaqnit və enerji xarakteristikalarının analitik təsviri
5.7. Sabit rejimlərdə alternativ idarəetmə qanunu ilə körpü impuls eni çeviricisinin simulyasiyası
5.8. Mexatronika sistemlərində PWM-nin dinamik modelləri
5.9. Avtonom çeviricilər
5.10. İnverterlərin əsas xüsusiyyətləri
5.11. Üç fazalı çeviricinin modelləşdirilməsi
5.12. Enerji yarımkeçirici çeviriciləri üçün ikinci dərəcəli enerji təchizatı modelinin dizaynı
Fəsil 6. Sim Power System paketində elektrik avtomobilləri
6.1. Sim Power System paketində DC maşınının riyazi təsviri və modelləri
6.2. Sim Power System paketində asinxron maşınların riyazi təsviri və modelləri,
6.3. Sim Power System paketində sinxron maşınların riyazi təsviri və modelləri
Fəsil 7
7.1. Bir DC mühərrikinin riyazi təsviri, struktur diaqramları və modelləri
7.2. Tək dövrəli yüksək sürətli DC sistemində tənzimləyicilərin sintezi
7.3. İki dövrəli yüksək sürətli DC sistemində tənzimləyicilərin sintezi
7.4. Düz cərəyan servo sistemində nəzarətçilərin sintezi
7.5. DC servo robot sistemində nəzarətçilərin sintezi
7.6. PWM ilə tək dövrəli yüksək sürətli DC sisteminin virtual modeli
7.8. DC sisteminin statik xüsusiyyətlərinin virtual modeldə öyrənilməsi
7.9. Sim Power System paketində DC sistemlərinin simulyasiya laboratoriya skamyaları
7.10. Güc yarımkeçirici çeviriciləri ilə DC sisteminin layihələndirilməsi alqoritmi
Fəsil 8
8.1. Ümumiləşdirilmiş asinxron maşının riyazi təsviri, struktur və virtual sxemlərinin modelləşdirilməsi.
8.2. Tezliyə nəzarət edən asinxron sistemlərin struktur modelləri
8.3. Tezlik-cərəyan nəzarəti ilə asinxron sistemlərin struktur modelləri
8.4. Vektor nəzarəti ilə qapalı asinxron sistemlərin struktur modelləri
8.5. Vektor nəzarəti ilə virtual tezlik-cərəyan asinxron sistem
8.6. Qapalı asinxron sistemdə elektromaqnit prosesləri
8.7. Sim Power System paketində asinxron sistemlərin simulyasiya laboratoriyası stendləri
Fəsil 9
9.1. Giriş
9.2. DPR-PK ətalətsiz kanalı olan sabit koordinat sistemində fırçasız motorun riyazi təsviri, blok diaqramı və modeli
9.3. DPR-PK ətalətsiz kanalı olan fırlanan koordinat sistemində pistonlu mühərrikin riyazi təsviri, blok diaqramları və modelləri
9.4. VD-də çarpaz əlaqələrin təsirinin təhlili
9.5. Gərginlik mənbəyi ilə təchiz edildikdə HP-nin statik xüsusiyyətləri
9.6. Fırlanan Transformatorlara əsaslanan Rotor Mövqe Sensorları və Koordinat Konvertorları
9.7. DPR-PK-AI inertial kanalı olan bir klapan motorunun riyazi təsviri, blok diaqramları
9.8. DPR-PK-AI inertial kanalı olan HP-nin statik xüsusiyyətləri
9.9. VD-nin virtual modelinin ətalətsiz DPR-PC kanalı və sinusoidal PWM ilə çevirici tərəfindən tədqiqi.
9.10. DPR-PC inertial kanalı və sinusoidal PWM ilə bir çevirici ilə VD-nin virtual modelinin tədqiqi
9.11. Ətalətsiz kanal DPR-PK ilə fırlanan koordinat sistemində klapan motoru ilə iki dövrəli yüksək sürətli sistemdə nəzarətçilərin sintezi
9.12. DPR-PK inertial kanalı olan bir klapan mühərriki ilə iki dövrəli yüksək sürətli sistemdə nəzarətçilərin sintezi,
9.13. İki dövrəli sinxron yüksək sürətli virtual sistemdə nəzarətçilərin sintezi
9.14. Kontaktsız DC Motorlu Virtual Tək Döngü Sürət Sistemi
Ədəbiyyat
Adı: Matlab və Simulink. PC-də mexatronik sistemlərin dizaynı
Nəşriyyatçı: Crown-Vek
İl: 2008
Səhifələr: 368
ISBN: 978-5-903383-39-9
Format: DJVU
Ölçü: 21 MB
Dil: rus
Bu kitab Matlab-Simulink mühitində mexatronik sistemlərin modelləşdirilməsinə dair dərs vəsaitidir. Mexatronik sistemlərin öyrənilməsində istifadə olunan Simulink və Sim Power System paketlərinin kitabxanalarının təsviri verilmişdir. Sabit və dəyişən cərəyanın mexatronik sistemlərinin qurulması və model dizaynı məsələsi müzakirə olunur.
Kitab texniki universitetlərin və ali məktəblərin müvafiq ixtisaslarının tələbələri, aspirantlar, aspirantlar, təkmilləşdirmə kurslarının tələbələri, mexatronika sistemlərinin layihələndirilməsi üzrə mühəndislər, eləcə də tədris metodik işlərinin işlənib hazırlanmasında müasir kompüter texnologiyalarından istifadə etmək istəyən müəllimlər üçün faydalı ola bilər. komplekslər.
Ön söz
Modelləşdirmə və mexatronika. Əsas anlayışlar
1.1. Modelləşdirmə, əsas anlayışlar və təriflər
1.2. Mexatronika, əsas anlayışlar və təriflər
1.2.1. Mexatronik sistemin tərkibi,
1.3. Mexatronik sistemlərin modellərinin işlənib hazırlanması məsələləri
Simulink paketi - mexatronik sistemlər üçün vizual dizayn mühiti
2.1. Simulink-də modellərin yaradılması üçün ümumi mülahizələr
2.1.1. Simulink Kitabxana Bölmə Brauzeri
2.1.2. Modelin yaradılması
2.1.3. Hesablama parametrlərinin qurulması və onun icrası
2.1.4. İş sahəsi ilə paylaşma seçimlərinin qurulması
2.1.5. Hesablamanın aparılması
2.2. Simulink Kitabxanaları
2.2.1. Mənbələr - siqnal mənbələri,
2.2.2. Sinks - siqnal qəbulediciləri
2.2.3. Davamlı - analoq (davamlı) bloklar
2.2.4. Davamsızlıqlar - qeyri-xətti bloklar
2.2.5. Diskret - diskret bloklar
2.2.6. Riyaziyyat - riyazi əməliyyatlar blokları
2.2.7. Signal Routing - siqnal marşrutlaşdırma kitabxanası
Mexatronik sistemlərin idarəetmə obyektlərinin dinamikası
3.1. Mexatronik sistemlərdə fasiləsiz idarəetmə obyektlərinin riyazi təsviri
3.2. Mexatronik sistemlərdə diskret idarəetmə obyektlərinin riyazi təsviri
3.3. Control System Toolbox paketində mexatronik sistemlərin idarəetmə obyektlərinin riyazi təsvirinin təqdim edilməsi,
3.4. Simulink paketində mexatronik sistemlərin idarəetmə obyektlərinin riyazi təsvirinin təsviri
3.5. Control System Toolbox-da idarəetmə obyektlərinin dinamik xarakteristikası
3.6. Simuiik paketində mexatronik sistemlərin idarəetmə obyektlərinin dinamik xüsusiyyətləri
3.7. Keyfiyyətin qiymətləndirilməsi və mexatronik sistemlərin dinamik xarakteristikası üçün tələblər
3.7.1. Sistemdə keçid prosesinin göstəriciləri üzrə keyfiyyətin qiymətləndirilməsi
3.7.2. Tezliyə cavab analizinə əsaslanan keyfiyyət reytinqləri
3.7.3. Xarakterik tənliyin köklərinin paylanmasının təhlili əsasında keyfiyyət qiymətləndirmələri
3.7.4. İnteqral keyfiyyət qiymətləndirmələri
3.8. Mexatronik sistemlərdə tənzimləyicilər
3.8.1. Mexatronik sistemdə idarəedicilərin sintezi texnikası
3.8.2. Control System Toolbox paketində kök lokus metodu ilə davamlı nəzarətçilərin sintezi
3.8.3. Tabeliyində olan strukturlarda zaman və tezlik sahələrində davamlı nəzarətçilərin sintezi
3.9. Davamlı nəzarətçilərin rəqəmsal analoqlara çevrilməsi.
3.9.1. Paralel proqramlaşdırma metodu
3.9.2. Birbaşa proqramlaşdırma üsulu
3.10. Mexatronik sistemin nəbz bağlantısının dinamik xüsusiyyətləri,
Sim Power System paketindəki güc elektronikası cihazlarının elementləri
4.1. Giriş
4.2. Sim Güc Sistemi Genişləndirmə Paketi
4.2.1. Modellərin yaradılmasının əsas xüsusiyyətləri
4.3. Sim Power Systems 3 Kitabxanaları
4.3L. Elektrik mənbələri - elektrik enerjisi mənbələri
4.3.2. Elementlər - elektrik elementləri
4.3.3. Power Electronics - güc elektronikası cihazları
4.3.4. Ölçmələr - ölçmə və nəzarət cihazları
4.3.5. Powerlib Əlavələri - genişləndirilmiş kitabxanalar
4.4. Sim Power System paketində güc yarımkeçirici çeviricilərinin aktiv elementləri
4.4.1. DC gərginlik mənbəyi. İdeal sabit gərginlik mənbəyi
4.4.2. AC gərginlik mənbəyi. Alternativ (sinusoidal) gərginliyin ideal mənbəyi
4.4.3. AC Cari Mənbə. Alternativ (sinusoidal) cərəyanın ideal mənbəyi
4.4.4. Nəzarət olunan gərginlik mənbəyi. Nəzarət olunan gərginlik mənbəyi. Nəzarət olunan Cari Mənbə. Nəzarət olunan cərəyan mənbəyi
4.4.5. 3-Fazlı Mənbə. Üç fazalı sinusoidal gərginlik mənbəyi
4.5. Sim Güc Sistemində güc yarımkeçirici çeviricilərinin passiv elementləri
4.5.1. Giriş
4.5.2. Seriya RLC filialı. Serial RLC dövrəsi. Paralel RLC filialı. Paralel RLC dövrəsi. 3 Fazalı Seriya RLC Şöbəsi. Üç fazalı serial RLC dövrəsi. 3-
Faza Paralel RLC Şöbəsi. Üç fazalı paralel RLC dövrəsi.
4.5.3. RLC Yükləmə seriyası. Serial RLC yükü. Paralel RLC Yükü. Paralel RLC yükü. 3 Fazalı Seriya RLC Yükü. Üç fazalı serial RLC yükü.
3 Fazalı Paralel RLC Yükü. Üç fazalı paralel RLC yükü,
4.5.4. Qırıcı. AC açarı. 3 fazalı kəsici. Üç fazalı AC açarı
4.5.5. Üç fazalı nasazlıq bloku. Üç fazalı zədə bloku.
4.5.6. transformatorlar
4.5.7. Üç fazalı transformator (üç sarım). Üç fazalı üçdolaqlı transformator
4.6. Sim Power System paketində güc yarımkeçirici çeviricilərinin yarımkeçirici elementləri
4.6.1. Təsnifat yarımkeçirici qurğularçeviricilər
4.6.2. Güclü yarımkeçirici diodlar
4.6.3. Tiristor
4.6.4. Tam idarə olunan GTO tiristorları
4.6.5. Bipolyar IGBT (İzolyasiya edilmiş Qapı Bipolar Transistor) tranzistorları
4.6.6. MOSFET (Metal Oxide Semicondactor Field Effect Transistor) tranzistorları
4.6.7. Sim Güc Sistemində inteqral modul dizaynlar
Enerji elektronikası cihazlarının model tədqiqi
5.1. Giriş
5.2. Mexatronika sistemlərində güc yarımkeçirici çeviriciləri
5.3. Enerji elektronikası cihazlarının əsas xüsusiyyətləri
5.4. İdarə olunan rektifikatorlar
5.4.1. Giriş nitqi
5.4.2. Tək fazalı idarə olunan rektifikator
5.4.3. Şəbəkə ilə idarə olunan çevirici rejimində idarə olunan rektifikator
5.4.4. Üç fazalı idarə olunan düzəldicilər
5.4.5. İdarə olunan rektifikatorların ilkin cərəyanının daha yüksək harmonikləri
5.4.6. İdarə olunan rektifikatorların enerji və elektromaqnit xüsusiyyətləri
5.4.7. İdarə olunan rektifikatorun simulyasiyası (SW)
5.5. DC gərginlik çeviriciləri
5.5.1. Simmetrik idarəetmə qanunu ilə tək qollu sünbül
5.5.2. Rele cərəyanının tənzimlənməsi ilə tək qollu impuls eni çeviricisi
5.5.3. Körpü impuls eni çeviricisi
5.6. İmpuls eni çeviricilərinin elektromaqnit və enerji xarakteristikalarının analitik təsviri
5.7. Körpünün impuls eni çeviricisinin modelləşdirilməsi
sabit vəziyyətdə alternativ nəzarət qanunu ilə
5.8. Mexatronika sistemlərində PWM-nin dinamik modelləri
5.9. Avtonom çeviricilər
5.9.1. Giriş nitqi
5.9.2. Bir fazalı çeviricilər
5.9.3. Üç fazalı avtonom çeviricilər
5.9.4. Çoxsəviyyəli çeviricilər
5.10. İnverterlərin əsas xüsusiyyətləri
5.11. Üç fazalı çeviricinin modelləşdirilməsi
5.12. Enerji yarımkeçirici çeviriciləri üçün ikinci dərəcəli enerji təchizatı modelinin dizaynı
5.12.1. Dizayn sxemi mexatronik altsistem "şəbəkəsi - ikinci dərəcəli enerji mənbəyi enerji yarımkeçirici çeviricisi - elektrik maşını
5.12.2. VIP filtrli rektifikator
5.12.3. VIP kimi enerji boşaltma sxemi ilə düzəldici
5.12.4. VIP kimi impuls eni stabilizatoru olan rektifikator.
5.12.5. VIP olaraq sinusoidal PWM ilə şəbəkə üç fazalı çevirici (aktiv rektifikator)
Sim Power System paketində elektrik avtomobilləri
6.1. Sim Power System paketində DC maşınının riyazi təsviri və modelləri
6.2. Sim Power System paketində asinxron maşınların riyazi təsviri və modelləri,
6.3. Sim Power System paketində sinxron maşınların riyazi təsviri və modelləri
6.3.1. Maqnitoelektrik sinxron maşın
6.3.2. Step motorlar
DC mexatronik sistemlərinin model dizaynı
7.1. Bir DC mühərrikinin riyazi təsviri, struktur diaqramları və modelləri
7.2. Tək dövrəli yüksək sürətli DC sistemində tənzimləyicilərin sintezi
7.3 İki dövrəli yüksək sürətli DC sistemində tənzimləyicilərin sintezi
7.4. Düz cərəyan servo sistemində nəzarətçilərin sintezi
7.5. DC servo robot sistemində nəzarətçilərin sintezi
7.6. PWM ilə tək dövrəli yüksək sürətli DC sisteminin virtual modeli
7.8. DC sisteminin statik xüsusiyyətlərinin virtual modeldə öyrənilməsi
7.9. Sim Power System paketində DC sistemlərinin simulyasiya laboratoriya skamyaları
7.10. Güc yarımkeçirici çeviriciləri ilə DC sisteminin layihələndirilməsi alqoritmi
Asinxron mexatronik sistemlərin model dizaynı
8.1. Ümumiləşdirilmiş asinxron maşının riyazi təsviri, struktur və virtual sxemlərinin modelləşdirilməsi.
8.1.1. Asinxron dələ qəfəsli maşın
8.1.2. Sabit koordinat sistemində ACF-nin təhlili
8.1.3 Fırlanan koordinat sistemində ABC analizi
8.2. Tezliyə nəzarət edən asinxron sistemlərin struktur modelləri
8.3. Tezlik-cərəyan nəzarəti ilə asinxron sistemlərin struktur modelləri
8.4. Vektor nəzarəti ilə qapalı asinxron sistemlərin struktur modelləri
8.4.1. Vektor nəzarəti ilə tezliklərin asinxron sistemi
8.4.2. Vektor nəzarəti ilə tezlik-cərəyan asinxron sistem
8.5. Vektor nəzarəti ilə virtual tezlik-cərəyan asinxron sistem
8.6. Qapalı asinxron sistemdə elektromaqnit prosesləri
8.7. Sim Power System paketində asinxron sistemlərin simulyasiya laboratoriyası stendləri
Sinxron mexatronik sistemlərin model dizaynı
9.1. Giriş
9.2. DPR-PK ətalətsiz kanalı olan sabit koordinat sistemində fırçasız motorun riyazi təsviri, blok diaqramı və modeli
9.3. DPR-PK ətalətsiz kanalı olan fırlanan koordinat sistemində pistonlu mühərrikin riyazi təsviri, blok diaqramları və modelləri
9.4. VD-də çarpaz əlaqələrin təsirinin təhlili
9.5. Gərginlik mənbəyi ilə təchiz edildikdə HP-nin statik xüsusiyyətləri
9.6. Fırlanan Transformatorlara əsaslanan Rotor Mövqe Sensorları və Koordinat Konvertorları
9.7. DPR-PK-AI inertial kanalı olan bir klapan motorunun riyazi təsviri, blok diaqramları
9.8. DPR-PK-AI inertial kanalı olan HP-nin statik xüsusiyyətləri
9.9. VD-nin virtual modelinin ətalətsiz DPR-PC kanalı və sinusoidal PWM ilə çevirici tərəfindən tədqiqi.
9.10. DPR-PC inertial kanalı və sinusoidal PWM ilə bir çevirici ilə VD-nin virtual modelinin tədqiqi
9.11. Ətalətsiz kanal DPR-PK ilə fırlanan koordinat sistemində klapan motoru ilə iki dövrəli yüksək sürətli sistemdə nəzarətçilərin sintezi
9.12. DPR-PK inertial kanalı olan bir klapan mühərriki ilə iki dövrəli yüksək sürətli sistemdə nəzarətçilərin sintezi,
9.13. İki dövrəli sinxron yüksək sürətli virtual sistemdə nəzarətçilərin sintezi
9.14. Kontaktsız DC Motorlu Virtual Tək Döngü Sürət Sistemi
Ədəbiyyat
Yuxarıdakı düyməni sıxmaqla siz bu kitabın kağız versiyalarını və buna bənzər kitabları Labirint onlayn mağazasının saytında ala bilərsiniz.
UDC 681.2.001.5
I. I. Kalapışina, A. D. Pereçesova, K. A. Nuzhdin
MƏXATRONİK SİSTEMLƏRİN MODELLEŞMƏSİNDƏ MATHAB PAKETİNİN ÖYRƏNMƏ PROSESİNDƏ TƏTBİQİ
SITMATACS kitabxanası, SINTILKI paketi və MALABL mühitindən istifadə etməklə mexaniki sistemlərin modelləşdirilməsinə yanaşmanı nümayiş etdirən “MATLAB mühitində mexatronik sistemlərin modelləşdirilməsi (StiInk/ SITMATATS)” dərsliyinin icmalı təqdim olunur.
Açar sözlər: modelləşdirmə, camış, ErmMeskatsv, mexanizmlərin təhlili, mexanizmlərin kinematikası, mexanizmlərin dinamikası, dərslik.
Ən səmərəli sistemlərdən biridir proqram təminatı Bu gün ədədi hesablama Malabab - matris laboratoriyası və yüksək səviyyəli proqramlaşdırma dilidir. Sistemin imkanlarını genişləndirmək üçün 81tyNpk kitabxanası var - istifadə edərək müxtəlif sistemlərin və cihazların blok simulyasiyasını təmin edən əlavə. müasir texnologiya vizual yönümlü proqramlaşdırma. BtiNpk alətlər qutusunda ümumi olanlarla yanaşı, xüsusi təyinatlı məsələlərin həlli üçün xüsusi paketlər mövcuddur.Fiziki xarakterli sistemlərin və cihazların modelləşdirilməsi üçün Btvsare paketi daha çox maraq doğurur.Bu paketdə Btnpk-dən fərqli olaraq riyazi operator olan və siqnalların köməyi ilə bir-biri ilə qarşılıqlı əlaqədə olan bloklar, reaksiyaların köməyi ilə qarşılıqlı təsir göstərən fiziki təbiətli cisimlər olan bloklar var.
Malabab sistemi Rusiyanın bir çox universitetlərinin tədris prosesinə uğurla tətbiq olunur. Bu mövzuda çoxlu ədəbiyyat var, lakin xüsusi paketlər adətən kifayət qədər ətraflı təsvir edilmir, əlavə olaraq bir çox dərsliklər Ingilis dili. Bu baxımdan, elm və texnologiyanın müəyyən bir sahəsini əhatə edən xüsusi paketlərin alətlərini öyrənmək üçün dərsliklərin yaradılması xüsusilə vacibdir. Son bir neçə ildə ITMO Universitetinin (Sankt-Peterburq) Mexatronika şöbəsi tədris prosesində və elmi tədqiqatlarda SITMecbac8 paketindən geniş istifadə edir. Paketin aprobasiyası üçün əsas konkret fiziki modelin nəticələrinin onun analitik analoqu ilə müqayisəsi üsulu və onun yaxınlaşma dərəcəsi haqqında nəticədir. Mexanik sistemlərin modelləşdirilməsində əldə edilmiş təcrübə əsasında tələbə və müəllimlər üçün dərs vəsaiti yaradılmışdır.
Dərslikdə maşın və mexanizmlər nəzəriyyəsinin və nəzəri mexanikanın əsasları, eləcə də müxtəlif mexaniki sistemlərin və fiziki proseslərin MaLa mühitində riyazi modelləşdirmə üsulları verilmişdir. SmMediachs8 kitabxanasının və StiInk paketinin köməyi ilə hazırlanmış mexanizmlərin, mexaniki və ölçü sistemlərinin modelləri təqdim olunur.
Struktur olaraq dərslik dörd fəsildən ibarətdir, hər birində nəzəri məlumat bölməsi var, ətraflı nümunələr verilir, həmçinin tələbələrin müstəqil işləməsi üçün tapşırıqlar verilir. Dərslik yuxarı kurs tələbələri və magistratura tələbələri üçün nəzərdə tutulduğundan nəzəri məlumatlar istinad xarakteri daşıyır. Tələbələrə kömək etmək üçün geniş istinadlar siyahısı verilir. Tapşırıqların mürəkkəbliyi fəsildən fəsilə tədricən artır, lakin qeyd olunan tapşırıqların hər biri əvvəllər öyrənilmiş materiala əsaslanır və fərdi təlim nümunələri ardıcıl olaraq daha mürəkkəb olanlara alt sistemlər kimi daxil edilir ki, bu da bilikləri dəfələrlə təkrarlamaqla bilikləri möhkəmləndirməyə imkan verir. material. Təlim nümunələri addım-addım təhlil edilir, bütün istifadə olunan blokların və nəzarət proqramlarının parametrləri əlavələrdə verilir. Oxşar
MatLab 75 paketinin tədris prosesində tətbiqi
materialın təqdim edilməsi ardıcıllığı tələbəyə müstəqil şəkildə təlim keçirməyə imkan verir.
Modelləşdirmə üçün ilk, ən sadə nümunə riyazi sarkacın fiziki modelidir. Bu model ISMBAC paketinin blokları və onların qarşılıqlı əlaqə prinsipləri ilə tanış olmaq imkanı verir.
Bundan əlavə, modellərin mürəkkəblik səviyyəsi tədricən artır. Aşağıdakı nümunələr krank-sürüşmə mexanizmi, iki mərhələli sürət qutusu və qurğular üçün elastik burulma çubuğu asmalarının istehsalı üçün nəzərdə tutulmuş bir cihazın toxunması üçün aktuator modelidir. Qurğunun toxuculuq aktuatorunun modelinə əvvəllər baxılmış bütün alt sistemlər və ya onların ekvivalenti daxildir ki, bu da düz mexanizmlərin modelləşdirilməsi üçün nəzərdə tutulmuş SF paketinin bloklarının işləməsi haqqında tələbələrin ümumi biliklərini birləşdirməyə imkan verir. Təlim üçün bu modelin dəyəri ondadır ki, bu mexanizm mövcuddur və Yer maqnitizmi, ionosfer və radio dalğalarının yayılması İnstitutunun Sankt-Peterburq filialında istifadə olunur. Rusiya Elmlər Akademiyasının NV Puşkov.
Tövsiyə olunan dərslik ali təhsil müəssisələrinin magistrləri üçün nəzərdə tutulub təhsil müəssisələri 200100 “Alətqayırma” və 221000 “Mexatronika və robototexnika” ixtisasları üzrə magistr hazırlığı istiqaməti üzrə tələbələr. Dərslik həmçinin “Mexanizmlər və maşınlar nəzəriyyəsi”, “Mexatronik cihazların layihələndirilməsi”, “Cihazların layihələndirilməsi və konstruksiyasının əsasları” kurslarını öyrənən tələbələr üçün və “Mexatronikada sistemin modelləşdirilməsi”, “Magistratura proqramlarında istifadə etmək üçün faydalı ola bilər. Biomexatronikada modul texnologiyaları". elektronika və robototexnika". Dərslik müvafiq ixtisasların müəllim və elmi işçiləri üçün maraqlıdır. Dərslik UMO-nun 29.11.2013-cü il tarixli 588 saylı qərarı ilə "Alət mühəndisliyi" möhürü ilə təltif edilmişdir.
BİBLİOQRAFİYA
1. Həsən R., Rahideh A., Şəhid H. Çoxbarmaqlı əlin modelləşdirilməsi və qarşılıqlı nəzarəti // Proc. 19-cu intern. Konf. Avtomatlaşdırma və Hesablama üzrə: Gələcək Enerji və Avtomatlaşdırma. London, Böyük Britaniya, 2013. S. 126-131.
2. Musalimov V. M., Zamoruev G. B., Kalapışina İ. İ., Pereçesova A. D., Nuzhdin K. A. MatLab mühitində mexatronik sistemlərin modelləşdirilməsi (Simulink / SimMechanics): Proc. ali təhsil müəssisələri üçün müavinət. Sankt-Peterburq: NRU ITMO, 2013. 114 s.
3. Ghanbari A., Solaimani R., Rahmani A., Tabatabaie F. Sferik obyektləri tutmaq üçün beş barmaqlı robot əlinin dizaynı və simulyasiyası // Life Science Journal. 2013. Cild. 10. S. 140-145.
İrina İvanovna Kalapışina Anna Dmitrievna Pereçesova Konstantin Andreeviç Nuzhdin
cand. texnologiya. Elmlər, Dosent; ITMO Universiteti, Mexatronika Departamenti, Sankt-Peterburq; E-poçt: [email protected] ITMO Universiteti, Mexatronika Departamenti, Sankt-Peterburq; köməkçi; E-poçt: [email protected]

Birinci sinif şagirdlərinin uyğunlaşma dövrü onların idrak və öyrənmə prosesində mühüm mərhələdir. Valideynlər, müəllimlər və...

Addım 3. Hesabatın yaradılmasına hazırlıq Hesabatı yaratmaq üçün müştəriyə aşağıdakı məlumatlar lazımdır1. SHOZ 2....

Bütün alıcılar bilir ki, elektronika bazarında monopoliya xoş qarşılanmır. Buna görə də təəccüblü deyil ki, məşhur ...
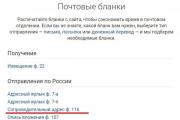
Çatdırılma zamanı nağd pulun necə göndəriləcəyini hamı başa düşmür. Bundan əlavə, bu sadə prosedurun öz ...

Çox vaxt adi bir insanın özü möhür düzəltmək barədə məlumatlara ehtiyacı yoxdur. Amma yenə də elə vaxtlar olur ki, məsləhət...
Əgər əvvəllər fərdi sahibkarlığın mövcudluğu və ya olmaması yalnız vergi orqanına baş çəkməklə təsdiqlənə bilərdi ...

Tikinti sahəsində əsas fiqurlardan biri tikinti-quraşdırma işlərinin ustasıdır. O, təşkil edir...

Katib, müavin və ya şəxsi köməkçi? Vəziyyətdən asılıdır! Tələbləri, öhdəlikləri və şərtləri nəzərə alın, ...

QCD texniki nəzarət şöbəsi zavodda müəssisənin müstəqil şöbəsidir. Hamısı...

Məhsula tələb funksiyası formaya malikdir: Qd = 15 - 2p Təchizat funksiyası Qs = -2 + 3p Müəyyən edin: 1. Tarazlıq ...

Müəssisədə İqtisadiyyat və idarəetmə ixtisası (təqdim olunan ixtisas - iqtisadçı-menecer) ...

Yadınızdadırmı ki, müəssisənin təsərrüfat fəaliyyətinin bütün hadisələri və prosesləri bir-biri ilə bağlıdır və ...

İş axtarırsınız və ya axtarmağı planlaşdırırsınız?Biznes meneceri vəzifəsi üçün CV doldurma nümunəmiz sizə kömək edəcək ...

Salam! Bu yazı sizə müsahibəni necə keçəcəyinizi göstərəcək. Bu gün öyrənəcəksiniz: Özünüzü necə aparmalı...

Ezhednevnik veb-saytı 2007-ci ildən bəri uğurlu və nüfuzlu Belarus iş adamlarının zirvələrini toplayır, bu gün ...

2019 Kiçik Biznes Başlanğıc Qrantı nə təklif edir və mən necə müraciət edə bilərəm? Çoxları üçün biznes açmaq...